Software
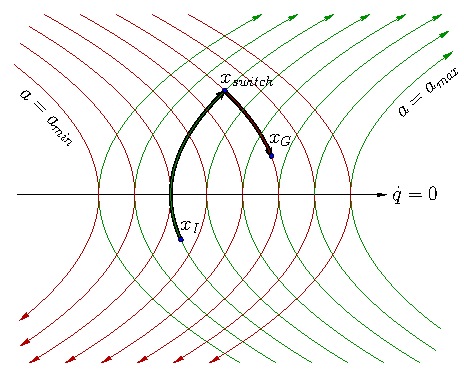
Bang-Bang Steering
This open-source Python
code
performs time-optimal steering for a vector of double integrators. We
used it to make RRT-based kinodynamic planning three orders of
magnitude faster. It is a simple module that can be used in other
planning or learning algorithms. It was written by Alexander LaValle.
See the related
IEEE IROS 2023
paper by A. J. LaValle. B. Sakcak, and S. M. LaValle.
Motion Strategy Library
This is the first open-source general-purpose motion planning library.
It was developed in 2000 for implementing and comparing motion
planning algorithms, for use in research, education, and industry.
See the
Motion Strategy
Library page.
MPNN: A Nearest-Neighbor Library for Motion Planning
A C++
library, written by
Anna
Yershova, that uses Kd-trees adapted to topological spaces that
arise in motion planning. This enables fast nearest-neighbor
computations in sampling-based motion planning
algorithms.
Sampling the Space of 3D Rotations, SO(3)
A C++ library that generates sequences of samples that are close to
uniform and have regular neighborhood structure.
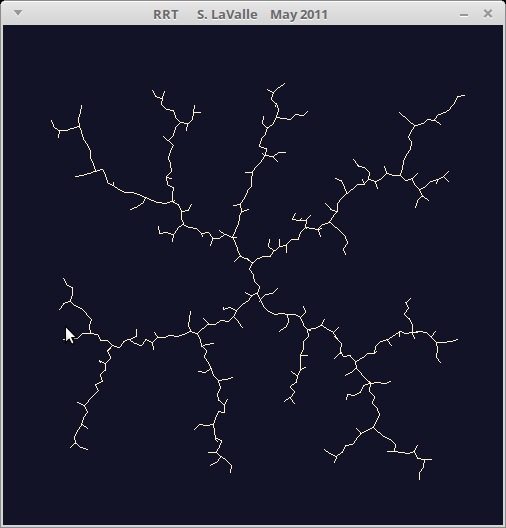
Embarrassingly Simple RRT Code
This Python
code uses
the
PyGame package, which is
easy to install (in Ubuntu, it is available by default from the
package installer). Note: This only draws the edges, rather than
maintain a data structure.
Planning Optimal Paths for Multiple Agents on Graphs
Written by
Jingjin Yu. The Java code is available
here and the associated paper is
here.