Research Themes
Click on an image for papers on that theme, or scroll down for all papers, sorted from newest to oldest.
 VR & Perception Engineering |
 Robot Brain Theory |
 Simpler Sensor Fusion |
 Wild, Bouncing Robots |
 Coordinating Multiple Robots |
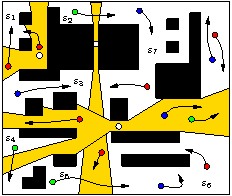 Visibility & Hide and Seek |
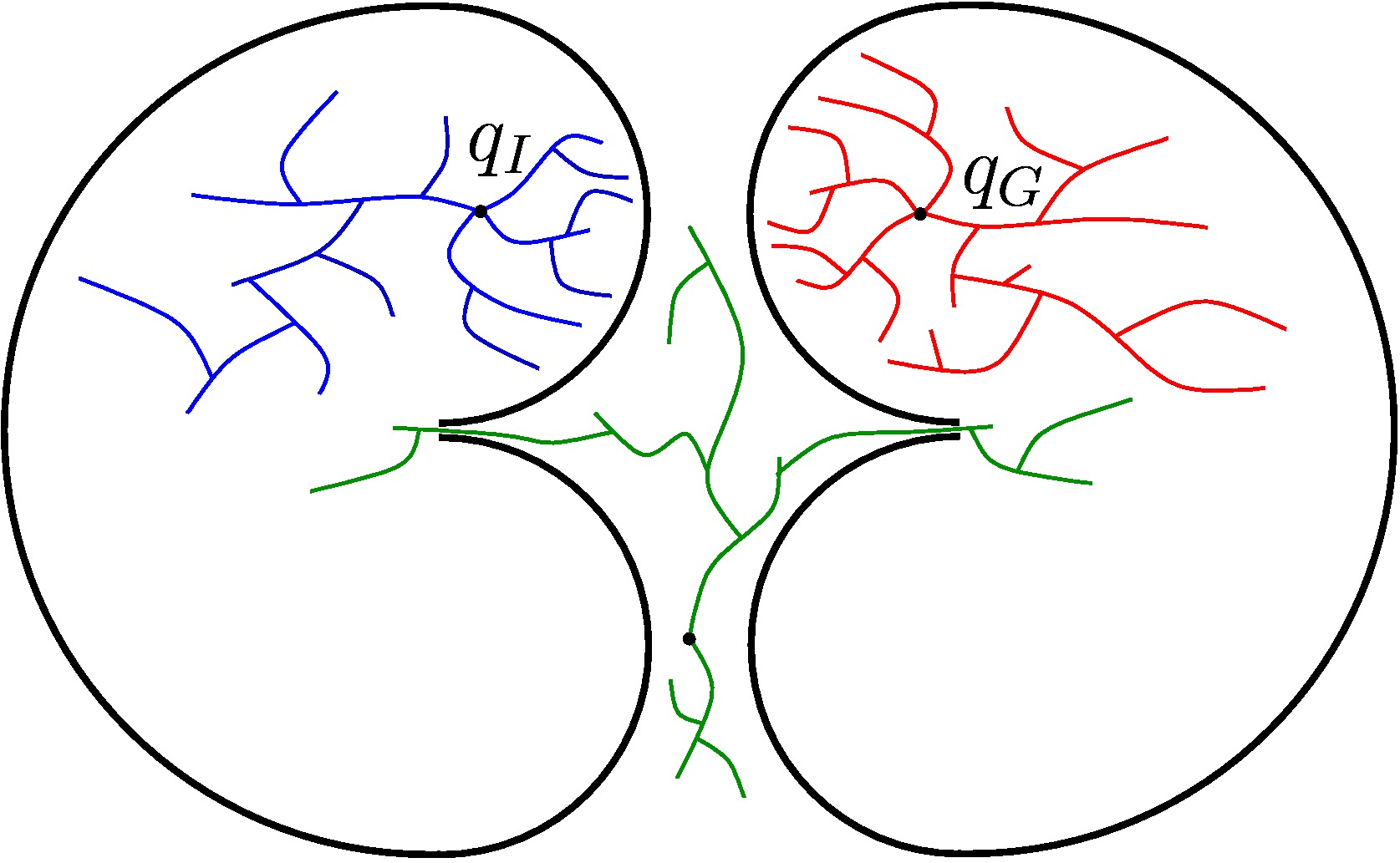 Sampling-Based Motion Planning |
 Rapidly exploring Random Trees |
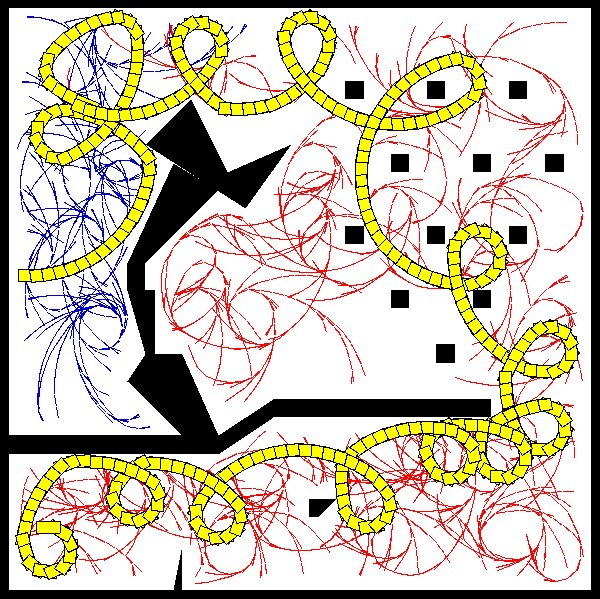 Planning w/ Differential Constraints |
 Feedback Motion Planning |
 Optimal Control |
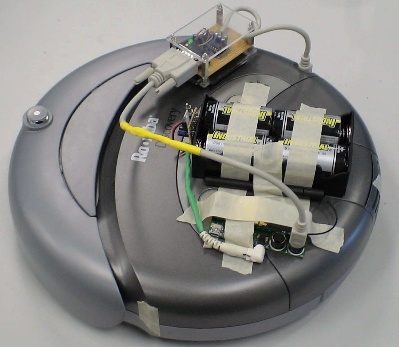 Mobile Robots |
 Landmark-Based Navigation |
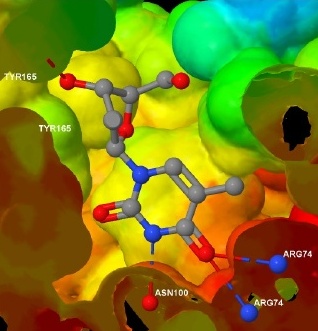 Drug Design |
 Computer Vision |
All Available Papers (Newest to Oldest)
Equivalent environments and covering spaces for robots. V. Weinstein and S. M. LaValle. In M. Farber and J. Gonzalez, editors, Topology, Geometry and AI. EMS Series in Industrial and Applied Mathematics, 2024. In press, [pdf].
From virtual reality to the emerging discipline of perception engineering. S. M. LaValle, E. G. Center, T. Ojala, M. Pouke, N. Prencipe, B. Sakcak, M. Soumalainen, K. G. Timperi, and V. Weinstein. Annual Reviews on Control, Robotics, and Autonomous Systems, 2024. [pdf].
Adaptation to simulated hypergravity in a virtual reality throwing task. M. Pouke, E. Uotila, E. G. Center, K. G. Timperi, A. P. Chambers, T. Ojala, and S. M. LaValle. ACM Transactions on Applied Perception, 2024. [pdf].
A mathematical characterization of minimally sufficient robot brains. B. Sakcak, K. G. Timperi, V. Weinstein, and S. M. LaValle. The International Journal of Robotics Research, 2023. [pdf].
Sensor localization by few distance measurements via the intersection of implicit manifolds. M. M. Bilevich, S. M. LaValle, and D. Halperin. In IEEE International Conference on Robotics and Automation, 2023. [pdf].
Virtual reality sickness reduces attention during immersive experiences. K. J. Mimnaugh, E. G. Center, M. Suomalainen, I. Becerra, E. Lozano, R. Murrieta-Cid, T. Ojala, S. M. LaValle, and K. D. Federmeier. IEEE Transactions on Visualization and Computer Graphics, 29(11):4394-4404, 2023. [pdf].
The limits of learning and planning: Minimal sufficient information transition systems. B. Sakcak, V. Weinstein, and S. M. LaValle. In S. M. LaValle, J. M. O'Kane, M. Otte, D. Sadigh, and P. Tokekar, editors, Algorithmic Foundations of Robotics, XV. Springer-Verlag, Berlin, 2023. [pdf].
Bang-bang boosting of RRTs. A. J. LaValle, B. Sakcak, and S. M. LaValle. In IEEE International Conference on Intelligent Robots and Systems, pages 2869-2876, 2023. [pdf].
Virtual Reality. S. M. LaValle. Cambridge University Press, 2023. Also available at http://lavalle.pl/vr/, [pdf].
Localization with few distance measurements. D. Halperin, S. M. LaValle, and B. Ugav. arXiv preprint arXiv:2209.04838, September 2022, [pdf].
Visibility-inspired models of touch sensors for navigation. K. Tiwari, B. Sakcak, P. Routray, Manivannan M., and S. M. LaValle. In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022. [pdf].
An enactivist-inspired mathematical model of cognition. V. Weinstein, B. Sakcak, and S. M. LaValle. Frontiers in Neurorobotics, September 2022. [pdf].
The body scaling effect and its impact on physics plausibility. M. Pouke, E. G. Center, A. P. Chambers, S. Pouke, T. Ojala, and S. M. LaValle. Frontiers in Virtual Reality, May 2022. [pdf].
Augmenting immersive telepresence experience with a virtual body. N. Arora, M. Suomalainen, M. Pouke, E. G. Center, K. J. Mimnaugh, A. P. Chambers, S. Pouke, and S. M. LaValle. IEEE Transactions on Visualization and Computer Graphics, 28(5):2135-2145, 2022. [pdf].
Human perception engineering. E. G. Center, K. Mimnaugh, J. Hakkinen, and S. M. LaValle. In M. Alcaniz, M. Sacco, and J. G. Tromp, editors, Roadmapping Extended Reality: Fundamentals and Applications. John Wiley \& Sons, 2022. [pdf].
Bouncing robots in rectilinear polygons. O. Cagirici, Y. Bahoo, and S. M. LaValle. In International Conference on Methods and Models in Automation and Robotics, pages 193-198, 2022. [pdf].
Unwinding rotations improves user comfort with immersive telepresence robots. M. Suomalainen, B. Sakcak, A. Widagdo, J. Kalliokoski, A. P. Chambers, T. Ojala, and S. M. LaValle. In ACM/IEEE International Conference on Human-Robot Interaction, pages 411-520, 2022. [pdf].
Leaning-based control of an immersive-telepresence robot. J. Halkola, M. Suomalainen, B. Sakcak, K. J. Mimnaugh, J. Kalliokoski, A. P. Chambers, T. Ojala, and S. M. LaValle. In IEEE International Symposium on Mixed and Augmented Reality, 2022. [pdf].
HI-DWA: human-influenced dynamic window approach for shared control of a telepresence robot. J. Kalliokoski, M. Suomalainen, B. Sakcak, A. P. Chambers, T. Ojala, and S. M. LaValle. In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022. [pdf].
Comfort and sickness while virtually aboard an autonomous telepresence robot. M. Suomalainen, K. J. Mimnaugh, I. Becerra, E. Lozano, R. Murrieta-Cid, and S. M. LaValle. In P. Bourdot, M. Alcaniz Raya, P. Figueroa, V. Interrante, T. W. Kuhlen, and D. Reiners, editors, EuroXR 2021: Virtual Reality and Mixed Reality (Lecture Notes in Computer Science, 13105), pages 3-24. Springer-Verlag, Berlin, 2021. [pdf].
Analysis of user preferences for robot motions in immersive telepresence. K. J. Mimnaugh, M. Suomalainen, I. Becerra, E. Lozano, R. Murrieta-Cid, and S. M. LaValle. In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021. [pdf].
Complete path planning that simultaneously optimizes length and clearance. B. Sakcak and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2021. [pdf].
The plausibility paradox for resized users in virtual environments. M. Pouke, K. J. Mimnaugh, A. P. Chambers, T. Ojala, and S. M. LaValle. Frontiers in Virtual Reality, April 2021. [pdf].
A visibility-based approach to computing nondeterministic bouncing strategies. A. Q. Nilles, Y. Ren, I. Becerra, and S. M. LaValle. The International Journal of Robotics Research, 2021. [pdf].
Information requirements of collision-based micromanipulation. A. Q. Nilles, A. Pervan, T. A. Berrueta, T. D. Murphey, and S. M. LaValle. In S. M. LaValle, M. Lin, T. Ojala, D. Shell, and J. Yu, editors, Algorithmic Foundations of Robotics, XIV. Springer-Verlag, Berlin, 2021. [pdf].
Assessing postural instability and cybersickness through linear and angular displacement. C. J. Widdowson, I. Becerra-Duran, C. Merrill, J. Wang, and S. M. LaValle. The Journal of the Human Factors and Ergonomics Society, 63(2):296-311, 2021. [pdf].
The plausibility paradox for scaled-down users in virtual environments. M. Pouke, K. J. Mimnaugh, T. Ojala, and S. M. LaValle. In 27th IEEE Conference on Virtual Reality and 3D User Interfaces, pages 913-921, 2020. [pdf].
Human perception-optimized planning for comfortable VR-based telepresence. I. Becerra, M. Suomalainen, E. Lozano, K. J. Mimnaugh, R. Murrieta-Cid, and S. M. LaValle. IEEE Robotics and Automation Letters, 5(4):6489-6496, 2020. [pdf].
Can simulated nature support health? Comparing short, single-doses of 360-degree nature videos in virtual reality with the outdoors. M. H. E. M. Browning, K. J. Mimnaugh, C. J. van Riper, H. K. Laurent, and S. M. LaValle. Frontiers in Psychology, 2020. [pdf].
Virtual reality for robots. M. Suomalainen, A. Q. Nilles, and S. M. LaValle. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 11458-11465, 2020. [pdf].
Robust combinatorial planning over simple boundary interactions. A. Q. Nilles and S. M. LaValle. In Workshop on Robust Task and Motion Planning at Robotic Science and Systems (RSS) Conference, 2019. [pdf].
A hardware and software testbed for underactuated self-assembling robots. A. Q. Nilles, J. Wasserman, A. Born, C. Horn, J. Born, and S. M. LaValle. In International Symposium on Multi-Robot and Multi-Agent Systems, pages 7-9, 2019. [pdf].
A motion strategy for exploration driven by an automaton activating feedback-based controllers. E. Martinez, G. Laguna, R. Murrieta-Cid, H. Becerra, R. Lopez-Padilla, and S. M. LaValle. Autonomous Robots, 43(7):1801-1825, January 2019. [pdf].
Sensor lattices: Structures for comparing information feedback. S. M. LaValle. In Proc. IEEE/IFAC 12th International Workshop on Robot Motion and Control, pages 239-246, 2019. [pdf].
Efficacy study on interactive mixed reality (IMR) software with sepsis prevention medical education. N. K. Sankaran, H. J Nisar, J. Zhang, K. Formella, J. Amos, L. T. Barker, J. Vozenilek, S. M. LaValle, and T. Kesavadas. In IEEE Conference on Virtual Reality and 3D User Interfaces, 2019. [pdf].
Optimal navigation for a differential drive disc robot: A game against the polygonal environment. R. Lopez-Padilla, R. Murrieta-Cid, I. Becerra, G. Laguna, and S. M. LaValle. Journal of Intelligent and Robotic Systems, 89(1-2):211-250, 2018. [pdf].
A visibility-based approach to computing nondeterministic bouncing strategies. A. Q. Nilles, Y. Ren, I. Becerra, and S. M. LaValle. In Proc. Workshop on the Algorithmic Foundations of Robotics, 2018. [pdf].
Effects of visual realism and moving detail on cybersickness. M. Pouke, A. Tiiro, S. M. LaValle, and T. Ojala. In IEEE Conference on Virtual Reality and 3D User Interfaces, 2018. [pdf].
Periodic trajectories of mobile robots. A. Q. Nilles, I. Becerra, and S. M. LaValle. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2017. [pdf].
Optimal multirobot path planning on graphs: Complete algorithms and effective heuristics. J. Yu and S. M. LaValle. IEEE Transactions on Robotics, 32(5):1163-1177, 2016. [pdf].
Virtual reality visualization of patient specific heart model. M. Bramlet, K. Wang, A. Clemons, N C. Speidel, S. M. LaValle, and T. Kesavadas. Journal of Cardiovascular Magnetic Resonance, 18(Suppl 1):T13, 2016. [pdf].
Intensity-based navigation with global guarantees. K. Taylor and S. M. LaValle. Autonomous Robots, 36(4):349-364, 2014. [pdf].
Head tracking for the Oculus Rift. S. M. LaValle, A. Yershova, M. Katsev, and M. Antonov. In IEEE International Conference on Robotics and Automation, 2014. [pdf].
Stochastic modeling, control, and evaluation of wild bodies. D. E. Gierl, L. Bobadilla, O. Sanchez, and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2014. [pdf].
Exploration of an unknown environment with a differential drive disc robot. G. Laguna, R. Murrieta-Cid, H. M. Becerra, R. Lopez-Padilla, and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2014. [pdf].
Combinatorial filters: Sensor beams, obstacles, and possible paths. B. Tovar, F. Cohen, L. Bobadilla, J. Czarnowski, and S. M. LaValle. ACM Transactions on Sensor Networks, 10(3), 2014. [pdf].
Planning under topological constraints using beam-graphs. V. Narayanan, P. Vernaza, M. Likhachev, and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Continuous planning with winding constraints using optimal heuristic-driven front propagation. D. S. Yershov, P. Vernaza, and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Simplicial label correcting algorithms for continuous stochastic shortest path problems. D. S. Yershov and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Toward the design and analysis of blind, bouncing robots. L. H. Erickson and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Shortest path set induced vertex ordering and its application to distributed distance optimal formation planning and control on graphs. J. Yu and S. M. LaValle. In IEEE Conference on Decision and Control, 2013. [pdf].
Fast, near-optimal computation for multi-robot path planning on graphs. J. Yu and S. M. LaValle. In AAAI Conference on Artificial Intelligence (AAAI-13), 2013. [pdf].
Structure and intractability of optimal multi-robot path planning on graphs. J. Yu and S. M. LaValle. In AAAI Conference on Artificial Intelligence (AAAI-13), 2013. [pdf].
Planning optimal paths for multiple robots on graphs. J. Yu and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Efficient formation path planning on large graphs. M. Katsev, J. Yu, and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2013. [pdf].
Time optimal multi-agent path planning on graphs. J. Yu and S. M. LaValle. In Proc. AAAI Workshop on Multiagent Pathfinding (WoMP), 2012. [pdf].
Distance optimal formation control on graphs with a tight convergence time guarantee. J. Yu and S. M. LaValle. In IEEE Conference on Decision and Control, 2012. [pdf].
Convex hull asymptotic shape evolution. M. Arnold, Y. Baryshnikov, and S. M. LaValle. In Proc. Workshop on the Algorithmic Foundations of Robotics, 2012. [pdf].
Counting moving bodies using sparse sensor beams. L. Erickson, J. Yu, Y. Huang, and S. M. LaValle. In Proc. Workshop on the Algorithmic Foundations of Robotics, 2012. [pdf].
Optimal gap navigation for a disc robot. R. Lopez-Padilla, R. Murrieta-Cid, and S. M. LaValle. In Proc. Workshop on the Algorithmic Foundations of Robotics, 2012. [pdf].
Multi-agent path planning and network flow. J. Yu and S. M. LaValle. In Proc. Workshop on the Algorithmic Foundations of Robotics, pages 157-173, 2012. [pdf].
Rendezvous without coordinates. J. Yu, D. Liberzon, and S. M. LaValle. IEEE Transactions on Automatic Control, 57(2):421-434, 2012. [pdf].
Controlling wild mobile robots using virtual gates and discrete transitions. L. Bobadilla, F. Martinez, E. Gobst, K. Gossman, and S. M. LaValle. In Proc. American Control Conference, 2012. [pdf].
Controlling wild bodies using discrete transition systems. L. Bobadilla, O. Sanchez, J. Czarnowski, K. Gossman, and S. M. LaValle. 2012. Unpublished manuscript, [pdf].
Sensing and Filtering: A Fresh Perspective Based on Preimages and Information Spaces. S. M. LaValle. volume 1:4 of Foundations and Trends in Robotics Series. Now Publishers, Delft, The Netherlands, 2012. [pdf].
Navigation among visually connected sets of partially distinguishable landmarks. L. Erickson and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2012. [pdf].
Shadow information spaces: Combinatorial filters for tracking targets. J. Yu and S. M. LaValle. IEEE Transactions on Robotics, 28(2):440-456, 2012. [pdf].
Motion planning: The essentials. S. M. LaValle. IEEE Robotics and Automation Society Magazine, 18(1):79-89, 2011. [pdf].
Motion planning: Wild frontiers. S. M. LaValle. IEEE Robotics and Automation Society Magazine, 18(2):108-118, 2011. [pdf].
Mapping and pursuit-evasion strategies for a simple wall-following robot. M. Katsev, A. Yershova, B. Tovar, R. Ghrist, and S. M. LaValle. IEEE Transactions on Robotics, 27(1):113-128, 2011. [pdf].
Minimalist multiple target tracking using directional sensor beams. L. Bobadilla, O. Sanchez, J. Czarnowski, and S. M. LaValle. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2011. [pdf].
Learning the Delaunay triangulation of landmarks from a distance ordering sensor. M. Katsev and S. M. LaValle. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2011. [pdf].
Simplicial Dijkstra and A* algorithms for optimal feedback planning. D. Yershov and S. M. LaValle. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2011. [pdf].
Space-filling trees: A new perspective on motion planning via incremental search. J. Kuffner and S. M. LaValle. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2011. [pdf].
An art gallery approach to ensuring that landmarks are distinguishable. L. Erickson and S. M. LaValle. In Proceedings Robotics: Science and Systems, 2011. [pdf].
Controlling wild bodies using linear temporal logic. L. Bobadilla, O. Sanchez, J. Czarnowski, K. Gossman, and S. M. LaValle. In Proceedings Robotics: Science and Systems, 2011. [pdf].
Manipulating ergodic bodies through gentle guidance. L. Bobadilla, K. Gossman, and S. M. LaValle. In Proceedings IEEE Conference on Robot Motion and Control, 2011. [pdf].
How many landmark colors are needed to avoid confusion in a polygon?. L. Erickson and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2011. [pdf].
Story validation and approximate path inference with a sparse network of heterogeneous sensors. J. Yu and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2011. [pdf].
Sufficient conditions for the existence of resolution complete planning algorithms. D. Yershov and S. M. LaValle. In Proceedings Workshop on Algorithmic Foundations of Robotics (WAFR), 2010. [pdf].
Generating uniform incremental grids on SO(3) using the Hopf fibration. A. Yershova, S. Jain, S. M. LaValle, and J. C. Mitchell. International Journal of Robotics Research, 29(7), 2010. [pdf].
Searching and mapping among indistinguishable convex obstacles. B. Tovar and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2010. [pdf].
Probabilistic shadow information spaces. J. Yu and S. M. LaValle. In IEEE International Conference on Robotics and Automation, 2010. [pdf].
Space-filling trees. J. J. Kuffner and S. M. LaValle. Technical Report CMU-RI-TR-09-47, Robotics Institute, Carnegie Mellon University, December 2009. [pdf].
Filtering and planning in information spaces. S. M. LaValle. Technical report, Department of Computer Science, University of Illinois, October 2009. [pdf].
Survivability: Measuring and ensuring path diversity. L. H. Erickson and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2009. [pdf].
I-Bug: An intensity-based bug algorithm. K. Taylor and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2009. [pdf].
Simple and efficient algorithms for computing smooth, collision-free feedback laws over given cell decompositions. S. R. Lindemann and S. M. LaValle. International Journal of Robotics Research, 28(5):600-621, 2009. [pdf].
Clearing a polygon with two 1-searchers. B. Simov, G. Slutzki, and S. M. LaValle. International Journal of Computational Geometry and Applications, 19(1), 2009. [pdf].
Motion planning. L. E. Kavraki and S. M. LaValle. In B. Siciliano and O. Khatib, editors, Springer Handbook of Robotics. Springer-Verlag, 2008. [pdf].
Exact Pareto optimal coordination of two translating polygonal robots on a cyclic roadmap. H. Chitsaz, S. M. LaValle, and J. M. O'Kane. In Proceedings 20th Canadian Conference on Computational Geometry, pages 179-182, 2008. [pdf].
Sensor beams, obstacles, and possible paths. B. Tovar, F. Cohen, and S. M. LaValle. In Proceedings Workshop on Algorithmic Foundations of Robotics (WAFR), 2008. [pdf].
Generating uniform incremental grids on SO(3) using the Hopf fibration. A. Yershova, S. M. LaValle, and J. C. Mitchell. In Proceedings Workshop on Algorithmic Foundations of Robotics (WAFR), 2008. [pdf].
Rendezvous without coordinates. J. Yu, D. Liberzon, and S. M. LaValle. In Proceedings IEEE Conference Decision and Control, pages 1803-1808, 2008. [pdf].
Improving the performance of sampling-based motion planning with symmetry-based gap reduction. P. Cheng, E. Frazzoli, and S. M. LaValle. IEEE Transactions on Robotics, 24(2):488-494, April 2008. [pdf].
Tracking hidden agents through shadow information spaces. J. Yu and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2008. [pdf].
Probabilistic localization with a blind robot. L. H. Erickson, J. Knuth, J. M. O'Kane, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2008. [pdf].
Motion planning for highly constrained spaces. A. Yershova and S. M. LaValle. Technical Report UIUCDCS-R-2008-2975, Department of Computer Science, University of Illinois, 2008. [pdf].
Comparing the power of robots. J. M. O'Kane and S. M. LaValle. The International Journal of Robotics Research, 27(1):5-23, 2008. [pdf].
On time: Clocks, chronometers, and open-loop control. S. M. LaValle and M. B. Egerstedt. In Proceedings IEEE Conference Decision and Control, 2007. [pdf].
Time-optimal paths for a Dubins airplane. H. Chitsaz and S. M. LaValle. In Proceedings IEEE Conference Decision and Control, 2007. [pdf].
Minimum wheel-rotation paths for differential drive mobile robots among piecewise smooth obstacles. H. Chitsaz and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2007. [pdf].
Distance-optimal navigation in an unknown environment without sensing distances. B. Tovar, R Murrieta-Cid, and S. M. LaValle. IEEE Transactions on Robotics, 23(3):506-518, June 2007. [pdf].
Sloppy motors, flaky sensors, and virtual dirt: Comparing imperfect, ill-informed robots. J. M. O'Kane and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2007. [pdf].
Smooth feedback for car-like vehicles in polygonal environments. S. R. Lindemann and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2007. [pdf].
Learning combinatorial information from alignments of landmarks. L. Freda, B. Tovar, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2007. [pdf].
Extracting visibility information by following walls. A. Yershova, B. Tovar, and S. M. LaValle. In S. Fekete, R. Fleischer, R. Klein, and A. Lopez-Ortiz, editors, Dagstuhl Seminar Proceedings 06421. Dagstuhl, 2007. [pdf].
Using a robot to learn geometric information from permutations of landmarks. B. Tovar, L. Freda, and S. M. LaValle. In Contemporary Mathematics, volume 438, pages 33-45. American Mathematical Society, 2007. [pdf].
Mapping and navigation from permutations of landmarks. B. Tovar, L. Freda, and S. M. LaValle. Technical report, Department of Computer Science, University of Illinois, June 2006. [pdf].
Localization with limited sensing. J. M. O'Kane and S. M. LaValle. IEEE Transactions on Robotics, 23(4):704-716, August 2007. [pdf].
Improving motion planning algorithms by efficient nearest-neighbor searching. A. Yershova and S. M. LaValle. IEEE Transactions on Robotics, 23(1):151-157, February 2007. [pdf].
Nonpositive curvature and pareto-optimal coordination of robots. R. Ghrist and S. M. LaValle. SIAM Journal of Control and Optimization, 45(5):1697-1713, 2006. [pdf].
Algorithms for planning under uncertainty in prediction and sensing. J. M. O'Kane, B. Tovar, P. Cheng, and S. M. LaValle. In Autonomous Mobile Robots: Sensing, Control, Decision-Making, and Applications. Marcel Dekker, 2006. [pdf].
Visibility-based pursuit-evasion with bounded speed. B. Tovar and S. M. LaValle. In Proceedings Workshop on Algorithmic Foundations of Robotics, 2006. [pdf].
Real time feedback control for nonholonomic mobile robots with obstacles. S. R. Lindemann, I. I. Hussein, and S. M. LaValle. In Proceedings IEEE Conference Decision and Control, 2006. [pdf].
An explicit characterizaton of minimum wheel-rotation paths for differential-drives. H. Chitsaz, S. M. LaValle, D. J. Balkcom, and M. T. Mason. In Proceedings 12th IEEE International Conference on Methods and Models in Automation and Robotics, 2006. [pdf].
On comparing the power of mobile robots. J. M. O'Kane and S. M. LaValle. In Proceedings Robotics: Science and Systems, 2006. [pdf].
Computing smooth feedback plans over cylindrical algebraic decompositions. S. R. Lindemann and S. M. LaValle. In Proceedings Robotics: Science and Systems, 2006. [pdf].
Global localization using odometry. J. M. O'Kane. In Proceedings IEEE International Conference on Robotics and Automation, 2006. [pdf].
A multiresolution approach for motion planning under differential constraints. S. R. Lindemann and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2006. [pdf].
Minimum wheel-rotation paths for differential-drive mobile robots. H. Chitsaz, S. M. LaValle, D. J. Balkcom, and M. T. Mason. In Proceedings IEEE International Conference on Robotics and Automation, 2006. [pdf].
Bitbots: Simple robots solving complex tasks. A. Yershova, B. Tovar, R. Ghrist, and S. M. LaValle. In Proceedings AAAI National Conference on Artificial Intelligence, 2005. [pdf].
Smoothly blending vector fields for global robot navigation. S. R. Lindemann and S. M. LaValle. In Proceedings IEEE Conference Decision and Control, pages 3353-3559, 2005. [pdf].
Almost-sensorless localization. J. M. O'Kane and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2005. [pdf].
Dynamic-domain RRTs: Efficient exploration by controlling the sampling domain. A. Yershova, L. Jaillet, T. Simeon, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2005. [pdf].
Computing Pareto Optimal Coordinations on Roadmaps. R. Ghrist, J. M. O'Kane, and S. M. LaValle. International Journal of Robotics Research, 24(11):997-1010, 2005. [pdf].
Adaptive tuning of the sampling domain for dynamic-domain RRTs. L. Jaillet, A. Yershova, S. M. LaValle, and T. Simeon. In Proceedings IEEE International Conference on Intelligent Robots and Systems, 2005. [pdf].
Information spaces for mobile robots. B. Tovar, A. Yershova, J. M. O'Kane, and S. M. LaValle. In Proceedings International Workshop on Robot Motion and Control (RoMoCo 2005), 2005. [pdf].
Pareto optimal coordination on roadmaps. R. Ghrist, J. M. O'Kane, and S. M. LaValle. In M. Erdmann, D. Hsu, M. Overmars, and A. F. van der Stappen, editors, Algorithmic Foundations of Robotics, VI. Springer-Verlag, Berlin, 2005. [pdf].
Incremental grid sampling strategies in robotics. S. R. Lindemann, A. Yershova, and S. M. LaValle. In M. Erdmann, D. Hsu, M. Overmars, and A. F. van der Stappen, editors, Algorithmic Foundations of Robotics, VI. Springer-Verlag, Berlin, 2005. [pdf].
Gap navigation trees: A minimal representation for visibility-based tasks. B. Tovar, L. Guilamo, and S. M. LaValle. In M. Erdmann, D. Hsu, M. Overmars, and A. F. van der Stappen, editors, Algorithmic Foundations of Robotics, VI. Springer-Verlag, Berlin, 2005. [pdf].
Pursuit-evasion in an unknown environment using gap navigation trees. L. Guilamo, B. Tovar, and S. M. LaValle. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004. [pdf].
On the relationship between classical grid search and probabilistic roadmaps. S. M. LaValle, M. S. Branicky, and S. R. Lindemann. International Journal of Robotics Research, 23(7/8):673-692, July/August 2004. [pdf].
The sampling-based neighborhood graph: A framework for planning and executing feedback motion strategies. L. Yang and S. M. LaValle. IEEE Transactions on Robotics and Automation, 20(3):419-432, June 2004. [pdf].
Visibility-based pursuit-evasion in an unknown planar environment. S. Sachs, S. Rajko, and S. M. LaValle. International Journal of Robotics Research, 23(1):3-26, January 2004. [pdf].
Steps toward derandomizing RRTs. S. R. Lindemann and S. M. LaValle. In IEEE Fourth International Workshop on Robot Motion and Control, 2004. [pdf].
Deterministic sampling methods for spheres and SO(3). A. Yershova and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2004. [pdf].
Improving the performance of sampling-based planners by using a symmetry-exploiting gap reduction algorithm. P. Cheng, E. Frazzoli, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2004. [pdf].
Pareto-optimal coordination of two translating polygonal robots on an acyclic roadmap. H. Chitsaz, J. M. O'Kane, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2004. [pdf].
Incrementally reducing dispersion by increasing Voronoi bias in RRTs. S. R. Lindemann and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2004. [pdf].
Optimal navigation and object finding without geometric maps or localization. B. Tovar, S. M. LaValle, and R. Murrieta-Cid. In Proceedings IEEE International Conference on Robotics and Automation, pages 464-470, 2003. [pdf].
Current issues in sampling-based motion planning. S. R. Lindemann and S. M. LaValle. In P. Dario and R. Chatila, editors, Robotics Research: The Eleventh International Symposium, pages 36-54. Springer-Verlag, Berlin, 2005. [pdf].
Locally-optimal navigation in multiply-connected environments without geometric maps. B. Tovar, S. M. LaValle, and R. Murrieta-Cid. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003. [pdf].
Exploiting group symmetries to improve precision in kinodynamic and nonholonomic planning. P. Cheng, E. Frazzoli, and S. M. LaValle. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003. [pdf].
Incremental low-discrepancy lattice methods for motion planning. S. R. Lindemann and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 2920-2927, 2003. [pdf].
On the relationship between classical grid search and probabilistic roadmaps. S. M. LaValle and M. S. Branicky. In J.-D. Boissonat, J. Burdick, K. Y. Goldberg, and S. A. Hutchinson, editors, Algorithmic Foundations of Robotics. Springer-Verlag, Berlin, 2003. [pdf].
From dynamic programming to RRTs: Algorithmic design of feasible trajectories. S. M. LaValle. In A. Bicchi, H. I. Christensen, and D. Prattichizzo, editors, Control Problems in Robotics, pages 19-37. Springer-Verlag, Berlin, 2002. [pdf].
Pointers to quasi-monte carlo literature. S. M. LaValle. University of Illinois, December 2002, [pdf].
Efficient nearest neighbor searching for motion planning. A. Atramentov and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 632-637, 2002. [pdf].
Resolution complete rapidly-exploring random trees. P. Cheng and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 267-272, 2002. [pdf].
An improved random neighborhood graph approach. L. Yang and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 254-259, 2002. [pdf].
A complete pursuit-evasion algorithm for two pursuers using beam detection. B. Simov, S. M. LaValle, and G. Slutzki. In Proceedings IEEE International Conference on Robotics and Automation, pages 618-623, 2002. [pdf].
An algorithm for searching a polygonal region with a flashlight. S. M. LaValle, B. Simov, and G. Slutzki. International Journal of Computational Geometry and Applications, 12(1-2):87-113, 2002. [pdf].
Reducing metric sensitivity in randomized trajectory design. P. Cheng and S. M. LaValle. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 43-48, 2001. [pdf].
RRT-based trajectory design for autonomous automobiles and spacecraft. P. Cheng, Z. Shen, and S. M. LaValle. Archives of Control Sciences, 11(3-4):167-194, 2001. [pdf].
Algorithms for computing numerical optimal feedback motion strategies. S. M. LaValle and P. Konkimalla. International Journal of Robotics Research, 20(9):729-752, September 2001. [pdf].
A pursuit-evasion bug algorithm. S. Rajko and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 1954-1960, 2001. [pdf].
Quasi-randomized path planning. M. S. Branicky, S. M. LaValle, K. Olson, and L. Yang. In Proceedings IEEE International Conference on Robotics and Automation, pages 1481-1487, 2001. [pdf].
Visibility-based pursuit-evasion: The case of curved environments. S. M. LaValle and J. Hinrichsen. IEEE Transactions on Robotics and Automation, 17(2):196-201, April 2001. [pdf].
Randomized path planning for linkages with closed kinematic chains. J. Yakey, S. M. LaValle, and L. E. Kavraki. IEEE Transactions on Robotics and Automation, 17(6):951-958, December 2001. [pdf].
Randomized kinodynamic planning. S. M. LaValle and J. J. Kuffner. The International Journal of Robotics Research, 20(5):378-400, May 2001. [pdf].
Rapidly-exploring random trees: Progress and prospects. S. M. LaValle and J. J. Kuffner. In B. R. Donald, K. M. Lynch, and D. Rus, editors, Algorithmic and Computational Robotics: New Directions, pages 293-308. A K Peters, Wellesley, MA, 2001. [pdf].
A randomized kinematics-based approach to pharmacophore-constrained conformational search and database screening. S. M. LaValle, P. Finn, L. Kavraki, and J.-C. Latombe. J. Computational Chemistry, 21(9):731-747, 2000. [pdf].
Robot motion planning: A game-theoretic foundation. S. M. LaValle. Algorithmica, 26(3):430-465, 2000. [pdf].
Using randomization to find and optimize feasible trajectories for nonlinear systems. P. Cheng, Z. Shen, and S. M. LaValle. In Proceedings Annual Allerton Conference on Communications, Control, Computing, pages 926-935, 2000. [pdf].
An algorithm for searching a polygonal region with a flashlight. S. M. LaValle, B. Simov, and G. Slutzki. In Proceedings ACM Annual Symposium on Computational Geometry, 2000. [pdf].
Pursuit-evasion using beam detection. B. Simov, G. Slutzki, and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, 2000. [pdf].
RRT-connect: An efficient approach to single-query path planning. J. J. Kuffner and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 995-1001, 2000. [pdf].
A framework for planning feedback motion strategies based on a random neighborhood graph. L. Yang and S. M. LaValle. In Proceedings IEEE International Conference on Robotics and Automation, pages 544-549, 2000. [pdf].
Visibility-based pursuit-evasion in a polygonal environment. L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. International Journal of Computational Geometry and Applications, 9(5):471-494, 1999. [pdf].
Efficient database screening for rational drug design using pharmacophore-constrained conformational search. S. M. LaValle, P. Finn, L. E. Kavraki, and J.-C. Latombe. In Proceedings RECOMB (Annual International Conference on Molecular Biology), pages 250-259, 1999. [pdf].
Randomized kinodynamic planning. S. M. LaValle and J. J. Kuffner. In Proceedings IEEE International Conference on Robotics and Automation, pages 473-479, 1999. [pdf].
Efficient computation of optimal navigation functions for nonholonomic planning. P. Konkimalla and S. M. LaValle. In Proceedings First IEEE International Workshop on Robot Motion and Control, pages 187-192, 1999. [pdf].
Visibility-based pursuit-evasion: An extension to curved environments. S. M. LaValle and J. Hinrichsen. In Proceedings IEEE International Conference on Robotics and Automation, pages 1677-1682, 1999. [pdf].
A probabilistic roadmap approach for systems with closed kinematic chains. S. M. LaValle, J. Yakey, and L. E. Kavraki. In Proceedings IEEE International Conference on Robotics and Automation, pages 1671-1676, 1999. [pdf].
Optimal motion planning for multiple robots having independent goals. S. M. LaValle and S. A. Hutchinson. IEEE Trans. on Robotics and Automation, 14(6):912-925, December 1998. [pdf].
An objective-based framework for motion planning under sensing and control uncertainties. S. M. LaValle and S. A. Hutchinson. International Journal of Robotics Research, 17(1):19-42, January 1998. [pdf].
Programming is writing: Why student programs must be carefully evaluated. G. Leavens, A. Baker, V. Honavar, S. M. LaValle, and G. Prabhu. Mathematics and Computer Education, 32(3):284-295, Fall 1998. [pdf].
Numerical computation of optimal navigation functions on a simplicial complex. S. M. LaValle. In P. K. Agarwal, L. E. Kavraki, and M. T. Mason, editors, Robotics: The Algorithmic Perspective, pages 339-350. A K Peters, Wellesley, MA, 1998. [pdf].
Motion planning with visibility constraints: Building autonomous observers. H. H. Gonz\'alez-Ba\ nos, L. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, R. Motwani, and C. Tomasi. In Y. Shirai and S. Hirose, editors, Proceedings Eighth International Symposium on Robotics Research, pages 95-101. Springer-Verlag, Berlin, 1998. [pdf].
Rapidly-exploring random trees: A new tool for path planning. S. M. LaValle. TR 98-11, Computer Science Dept., Iowa State University, October 1998, [pdf].
Methods for numerical integration of high-dimensional probability densities with application to statistical image models. S. M. LaValle, K. J. Moroney, and S. A. Hutchinson. IEEE Transactions on Image Processing, 6(12):1659-1672, December 1997. [pdf].
On motion planning in changing, partially-predictable environments. S. M. LaValle and R. Sharma. International Journal of Robotics Research, 16(6):775-805, December 1997. [pdf].
Robot motion planning: A game-theoretic foundation. S. M. LaValle. In J.-P. Laumond and M. Overmars, editors, Algorithms for Robotic Motion and Manipulation, pages 15-29. A K Peters, Wellesley, MA, 1997. [pdf].
Visibility-based pursuit-evasion in a polygonal environment. L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. In F. Dehne, A. Rau-Chaplin, J.-R. Sack, and R. Tamassia, editors, WADS '97 Algorithms and Data Structures (Lecture Notes in Computer Science, 1272), pages 17-30. Springer-Verlag, Berlin, 1997. [pdf].
Finding an unpredictable target in a workspace with obstacles. S. M. LaValle, D. Lin, L. J. Guibas, J.-C. Latombe, and R. Motwani. In Proceedings IEEE International Conference on Robotics and Automation, pages 737-742, 1997. [pdf].
Motion strategies for maintaining visibility of a moving target. S. M. LaValle, H. H. Gonz\'alez-Ba\ nos, C. Becker, and J.-C. Latombe. In Proceedings IEEE International Conference on Robotics and Automation, pages 731-736, 1997. [pdf].
Optimizing robot motion strategies for assembly with stochastic models of the assembly process. R. Sharma, S. M. LaValle, and S. A. Hutchinson. IEEE Trans. on Robotics and Automation, 12(2):160-174, April 1996. [pdf].
Evaluating motion strategies under nondeterministic or probabilistic uncertainties in sensing and control. S. M. LaValle and S. A. Hutchinson. In Proceedings IEEE International Conference on Robotics and Automation, pages 3034-3039, April 1996. [pdf].
Optimal motion planning for multiple robots having independent goals. S. M. LaValle and S. A. Hutchinson. In Proceedings IEEE International Conference on Robotics and Automation, pages 2847-2852, April 1996. [pdf].
A game-theoretic framework for robot motion planning. S. M. LaValle. PhD thesis, University of Illinois, Urbana-Champaign, USA, July 1995. [pdf].
A framework for constructing probability distributions on the space of segmentations. S. M. LaValle and S. A. Hutchinson. Computer Vision and Image Understanding, 61(2):203-230, March 1995. [pdf].
A Bayesian segmentation methodology for parametric image models. S. M. LaValle and S. A. Hutchinson. IEEE Transactions on Pattern Analysis and Machine Intelligence, 17(2):211-218, February 1995. [pdf].
Optimizing robot motion strategies for assembly with stochastic models of the assembly process. R. Sharma, S. M. LaValle, and S. A. Hutchinson. In Proceedings IEEE Int'l Symp. on Assembly and Task Planning, pages 341-346, 1995. [pdf].
Motion planning in stochastic environments: Theory and modeling issues. S. M. LaValle and R. Sharma. In Proceedings IEEE International Conference on Robotics and Automation, pages 3057-3062, 1995. [pdf].
Motion planning in stochastic environments: Applications and computational issues. S. M. LaValle and R. Sharma. In Proceedings IEEE International Conference on Robotics and Automation, pages 3063-3068, 1995. [pdf].
An objective-based stochastic framework for manipulation planning. S. M. LaValle and S. A. Hutchinson. In Proceedings IEEE/RSJ/GI International Conference on Intelligent Robots and Systems, pages 1772-1779, September 1994. [pdf].
Robot motion planning in a changing, partially predictable environment. S. M. LaValle and R. Sharma. In Proceedings IEEE International Symposium on Intelligent Control, pages 261-266, August 1994. [pdf].
Path selection and coordination of multiple robots via Nash equilibria. S. M. LaValle and S. A. Hutchinson. In Proceedings IEEE International Conference on Robotics and Automation, pages 1847-1852, May 1994. [pdf].
Game theory as a unifying structure for a variety of robot tasks. S. M. LaValle and S. A. Hutchinson. In Proceedings IEEE International Symposium on Intelligent Control, pages 429-434, August 1993. [pdf].
On considering uncertainty and alternatives in low-level vision. S. M. LaValle and S. A. Hutchinson. In Proceedings Ninth Conference on Uncertainty in Artificial Intelligence, pages 55-63, July 1993. [pdf].
Methods for numerical integration of high-dimensional probability densities with application to statistical image models. S. M. LaValle, K. J. Moroney, and S. A. Hutchinson. In Proceedings 1993 SPIE Conference on Neural and Stochastic Methods in Image and Signal Processing, pages 292-303, July 1993. [pdf].
Bayesian region merging probability for parametric image models. S. M. LaValle and S. A. Hutchinson. In Proceedings 1993 IEEE Conference on Computer Vision and Pattern Recognition, pages 778-779, June 1993. [pdf].
Agglomerative clustering on range data with a unified probabilistic merging function and termination criterion. S. M. LaValle, K. J. Moroney, and S. A. Hutchinson. In Proceedings 1993 IEEE Conference on Computer Vision and Pattern Recognition, pages 798-799, June 1993. [pdf].
A Bayesian framework for considering probability distributions of image segments and segmentations. S. M. LaValle. Master's thesis, University of Illinois, Urbana-Champaign, USA, December 1992. [pdf].